
阅读《浅谈人工智能》
阅读《浅谈人工智能》
下面是基本的思维导图
本文根据乌鸦的学习示例提出智能的本质在于通过少量数据,以任务为导向,发展智能的模式。
当前的AI是从大量的数据中发现模式,而在数据中的的标注,其实相当于为大量的数据指定一个单一的任务。但是智能不应该是这样的。文中关于乌鸦的示例就是如此。
一只乌鸦,必须靠自己的观察、感知、认知、学习、推理、执行,完全自主生活。要在城里活下去,乌鸦首先面临一个任务,就是寻找食物。它找到了坚果,需要砸碎,可是这个任务超出它的物理动作的能力。它把坚果从天上往下抛,发现解决不了这个任务。在这个过程中,它就发现一个诀窍,把果子放到路上让车轧过去,可以砸碎坚果,但它到路中间去吃是一件很危险的事。因为在一个车水马龙的路面上,随时它就牺牲了。这个过程是没有大数据训练的,也没有所谓监督学习,乌鸦的生命没有第二次机会。这是与当前很多机器学习,特别是深度学习完全不同的机制。然后,它又开始观察了,它发现在靠近红绿路灯的路口,车子和人有时候停下了。这时,它必须进一步领悟出红绿灯、斑马线、行人指示灯、车子停、人流停这之间复杂的因果链。甚至,哪个灯在哪个方向管用、对什么对象管用。搞清楚之后,乌鸦就选择了一根正好在斑马线上方的一根电线,蹲下来了。也许它观察和学习的是别的地点,那个点没有这些蹲点的条件。它必须相信,同样的因果关系,可以搬到当前的地点来用。这一点,当前很多机器学习方法是做不到的。
它把坚果抛到斑马线上,等车子轧过去,然后等到行人灯亮了。这个时候,车子都停在斑马线外面,它终于可以从容不迫地走过去,吃到了地上的果肉。你说这个乌鸦有多聪明,这是我期望的真正的智能。
在这个乌鸦模式中,在没有大数据学习、低功耗的情况下,一个完全自主的智能(感知、认知、推理、学习、执行)是可能的。
实现方法可能的路径是: 人工智能六大领域的合成。也就是说,通过小数据、任务为导向的前提下,整合六大领域的数据,试图发现智能的新方法。
就是说,为了完成一个任务,在现有的数据下,多试试,如果不行,再改造工具。
隐藏的信息 这样,首先,我们要认识到,数据可以提供的信息可能比我们想象的要多。 以计算机视觉为例,当前的卷积网络的深度学习,主要是对像素进行分析,以一张作者女儿在喝水的照片为例,当前的人工智能可以分析出照片的内容,可以认出照片中各种物体,但是照片中给出的信息应该远不止如此,比如,根据比例,能判断出图中物体的三维特征,比如高度宽度等,也能根据物理原理,判断一个挂在墙上的物体一定被某种东西固定在墙上。能判断一个物体的功能……。 比如现在有一个任务,让一个机器人进屋给室外的人倒一杯水,根据照片,能进行一个不精确的三维建模,能根据照片中的女孩喝水的状态,判断什么是水杯,盛水容器的特征等等。这样机器人应该能做一个基本的判断,判断在哪里拿到水杯,到哪里倒入饮用水。而这些动作的进行,其实和人一样是模糊的,在运行过程中不断地根据最新的数据逐步精确化。
但是作者认为的这些图像之外的“暗物质”,是通过人的想象和推理过程来完成的。但是这些过程其实是其它的数据引发的,作者认为的小数据,基础却是其它大量的数据,只是这些数据是没有直接关系的,对经历的数据的收集,形成了“经验”,而这些“经验”的来源是广泛的。可以是直接的,也可以是间接的。
以乌鸦为例,它是没有可能通过大数据判断安全的道路状态,但是它可能看到一只乌鸦在红灯时安全地吃到坚果,另一只乌鸦在绿灯时被车撞死。但是如果以这种方式产生智能,其实与我们的目标其实也是有些不同的,我们希望一个特定的机器能产生特定的智能,但乌鸦并不是每一只都是如此聪明,因为即使两只乌鸦同时看到以上的信息,也不能说,它们都可以把生死状态与红绿灯关联起来。可能一只笨蛋乌鸦会认为坚果的大小才是决定性因素。当我们开发一个人工智能时,我们是希望人工智能是一个可以预测的可靠工具。
当然,我们可以把一个人工智能的整体(世界上所有智能体的总和)当作产品,这样,它就是一个比人更聪明的AI。
以乌鸦模式为例,所谓的小功耗小数据的高智能,其实是以种群为基础的。那么我们可不可以不是从大数据精简出一套小模型,而是由大量的智能体,从分散的数据中学习“经验”,然后相互交流,达成共识,形成专家系统。
认识推理 文中的示例,通视频监控,机器人看到一个人站在厨房,根据人的位置,沿着他的目光,看到他可能关注的物体,比如一个微波炉,判断他的行为。比如,要加热食品,或者是从中取出食品,如果有更多的信息,比如这是一个损坏的微波炉……,根据信息作出判断(推理),信息的获取,可以是观察,但更有效的是交流
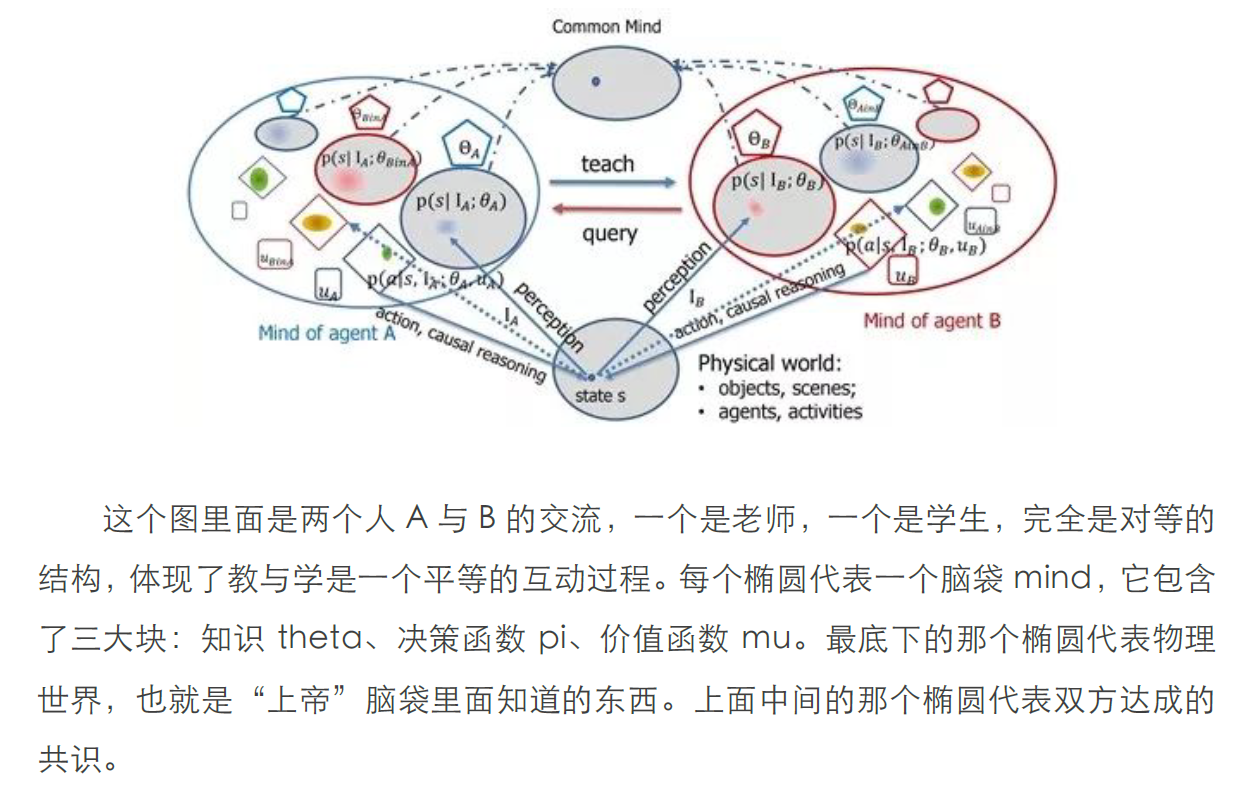
语言沟通 有效沟通的前提的双方会有一些共识(共同的认知体系),双方拥有的共识(思维方式、知识体系)越多,沟通越有效率。 在考虑到初始状态下,双方的共识很少,为了有效沟通,只能在最基础的共识上进行初始的交流,比如图形。 对于自主学习来说,没有人对数据进行标注,那么结果是正确还是错误呢?可以通过一种公众评审,类似于区块链中的共识算法,而得到这些评审内容则又需要通过沟通才能得到反馈。 以火车悖论来说,轧10个人还是1个人,是一个道德判断,假如一个智能第一次无法决定,它向10个智能体进行咨询,10个其它的智能体给出不同的判断,这个智能体可以根据简单多数进行决策。那么其它的智能体是如何做出判断的呢?这与它们的“经验”有关,而这些“经验”可能与它们的学习地点,学习内容有关,比如一个智能体只学到了“功利主义”,它可能会建议改道去轧那1个人。那么哪个决定是“合乎道德”的呢?这要看这个问题出现的时间和地点了。也就是说,所谓的道德是“时空伴随”的。
博弈伦理 使用损失函数 这其实和普通的机器学习原理相似,但是再类比人类的学习方式,比如归纳和演绎,就比较复杂了。
机器人学:构建大任务平台 其实就是机器人在任务执行过程中不停地刷新数据,同时作出响应,这样在每个时刻,数据量都不是很大,但是持续的数据都会是上下文的一部分。 但是在例子中,任务其实是不停地被分解被创造的,比如机器人听到有人敲门,它会去开门,并与人握手,打开门时,发现对方双手都提着东西,这时它的要会在当前任务执行时,增加新的中间过程,因为它发现别人双手都被占用,需要帮助,它应该去帮助别人拿东西并放置好,再继续任务。
机器学习:学习的极限和“停机问题” 真正的学习是一种交互过程
上面包括了常用的七种学习模式
- 被动统计学习passive statistical learning:上面刚刚谈到的、当前最流行的学习模式,用大数据拟合模型;
- 主动学习active learning:学生可以问老师主动要数据,这个在机器学习里面也流行过;
- 算法教学 algorithmic teaching:老师主动跟踪学生的进展和能力,然后,设计例子来帮你学。这是成本比较高的、理想的优秀教师的教学方式;
- 演示学习learning from demonstration:这是机器人学科里面常用的,就是手把手叫机器人做动作。一个变种是模仿学习immitation learning;
- 感知因果学习perceptual causality:这是我发明的一种,就是通过观察别人行为的因果,而不需要去做实验验证,学习出来的因果模型,这在人类认知中十分普遍;
- 因果学习causal learning:通过动手实验, 控制其它变量, 而得到更可靠的因果模型, 科学实验往往属于这一类;
- 增强学习reinforcement learning:就是去学习决策函数与价值函数的一种方法。
停机问题,就是这个动态过程中所达成的各种平衡态。也就是说各种因素的综合决定了学习中止。